x is how much you are prepared, y is how lucky you are.
You are responsible for the x part of the equation, the y takes care of itself. If your preparation effort is zero, all the potential opportunities will be multiplied by zero and you will lose every one of them, no matter how big they were.
The more prepared you are, the more lucky you become. It’s not because you are lucky, rather because you can multiply small opportunities by big factors.
This idea is inspired by Richard W. Hamming’s thoughts on luck, mentioned in his book, The Art of Doing Science and Engineering. He walks through all the coincidences that led him to his discoveries. Those coincidences have occured for many people – none of them were prepared, only Hamming was.
Could you have discovered what Hamming did if you were in his position? Yes, only if you were prepared.
I was reading Paul Graham’s essay How to Make Wealth, one of the ideas that caught my mind is to always choose the harder decisions – the ones you only can go along with its consequences, the others cannot.
The metaphor is:
At Viaweb one of our rules of thumb was run upstairs. Suppose you are a little, nimble guy being chased by a big, fat, bully. You open a door and find yourself in a staircase. Do you go up or down? I say up. The bully can probably run downstairs as fast as you can. Going upstairs his bulk will be more of a disadvantage. Running upstairs is hard for you but even harder for him.
How to protect your idea? Make it difficult.
But difficulty is relative. If you’re a domain expert, picking a unique problem to work on that most people out of your domain cannot. For you, the domain expert, the problem you solve may be easy for you because you already spent a huge amount of time working in the domain – and you know everything about it.
It’s hard for other people to follow, but it’s easy for you.
In June 2020, I finally started to have sequential routine days. The longest period I had previously was ~60 days long, then the ups and downs started all over again.
But now I’m done with everything, and time is all mine.
Routine days are the core blocks of what accumulates over time.
If an hour is killed, the day follows. If the day is killed, the week follows.. and so your life as well.
I resist any extrinsic (and intrinsic) causes that may break the sequence: I refuse phone calls, interruptions, unscheduled hangouts.. only to protect time.
Genuine curiosity drives me to read something, a little thing. A few minutes later I found myself immersed in research: interesting ideas scattered all over the screen. Me, in total isolation of the surrounded world, connected with pure source of power, the ideas. When I connect with a single idea, a spark in my mind occurs. And suddenly, all the other connected thoughts and ideas started to spark and volatilize. A surreal scene of endless flow of electrochemical signals, and the only you thing you have to do is to capture those thoughts into words.
So I write, and write, and write.
Writing is about discovering the unknowns. This is how I get to generate ideas and connect them togather.
“So for six years of working on that research project, I could just go into the cave and work and work and work. And that kind of deep work, you have to go deep into the data, deep into the research, deep into the thinking, the long cycles of reflection, that’s how you get the ideas. And that’s how you do good stuff”
One thing I’m thinking to commit upon is to only do meaningful work. I find it so hard to work on something that doesn’t provide any value.
Working for the sake of money doesn’t last. Even when it’s a huge amount of money. I do care to invest my time for the benefit of others, for the benefit of real users.
Always thinking that life is too short to build useless products and useless features. It’s rather much more valuable to extract all the meaningless work from your life, put it in the trash, and start to focus only on what matters the most.
Valuable work is much more rewarding for oneself. And it’s not hard to earn money while doing valuable work. Indeed, if your work truly provides value, it’s easier to earn money from it.
As I’m reading Shape Up, this has perfectly captured my perspective of interruptions:
When people ask for “just a few hours” or “just one day,” don’t be fooled. Momentum and progress are second-order things, like growth or acceleration. You can’t describe them with one point. You need an uninterrupted curve of points. When you pull someone away for one day to fix a bug or help a different team, you don’t just lose a day. You lose the momentum they built up and the time it will take to gain it back. Losing the wrong hour can kill a day. Losing a day can kill a week.
It is the perspective of which I’d like to view interruptions. The cost of a single interruption is multiplied by the number of time units you have been focused in.
When working for 6 hours continuously, the interruption would destroy everything you have mentally built for 6 hours. You need to rebuild (accelerate from zero) to get back to the state of deep focus you were in.
Acceleration and momentum is the physical metaphor Ryan has used. I usually think of deep working as riding a bicycle, you start from zero, then start accelerating till you reach the maximum speed. If someone down the road stopped you (aka: interrupted you) for a minute, you need to settle down and then start accelerating back from zero. Multiple interruptions during the day = you lost the entire day.
It’s been a busy month working on my contribution to a funded research project for building modular Unmanned Ground Vehicles (UGV) controlled via IoT.
First three prototypes.
The main job of the vehicles is to perform surveillance missions. Each vehicle is connected to the internet via a wireless network or LTE. In case the internet is disconnected, it runs in autonomous mode. It’s equipped with the required sensors and obstacle avoidance algorithms in order to navigate its way back to the base station.
Two controllers are mounted on each vehicle, ATmega8U2 and Raspberry PI. Both are connected via serial communication.
The Raspberry PI is responsible for streaming a live video through the mounted camera, to send telemetry data to the cloud, and to receive the commands. The ATmega8U2 is responsible for the vehicles movement and autonomous mode algorithm. It executes the commands received from the Raspberry PI.
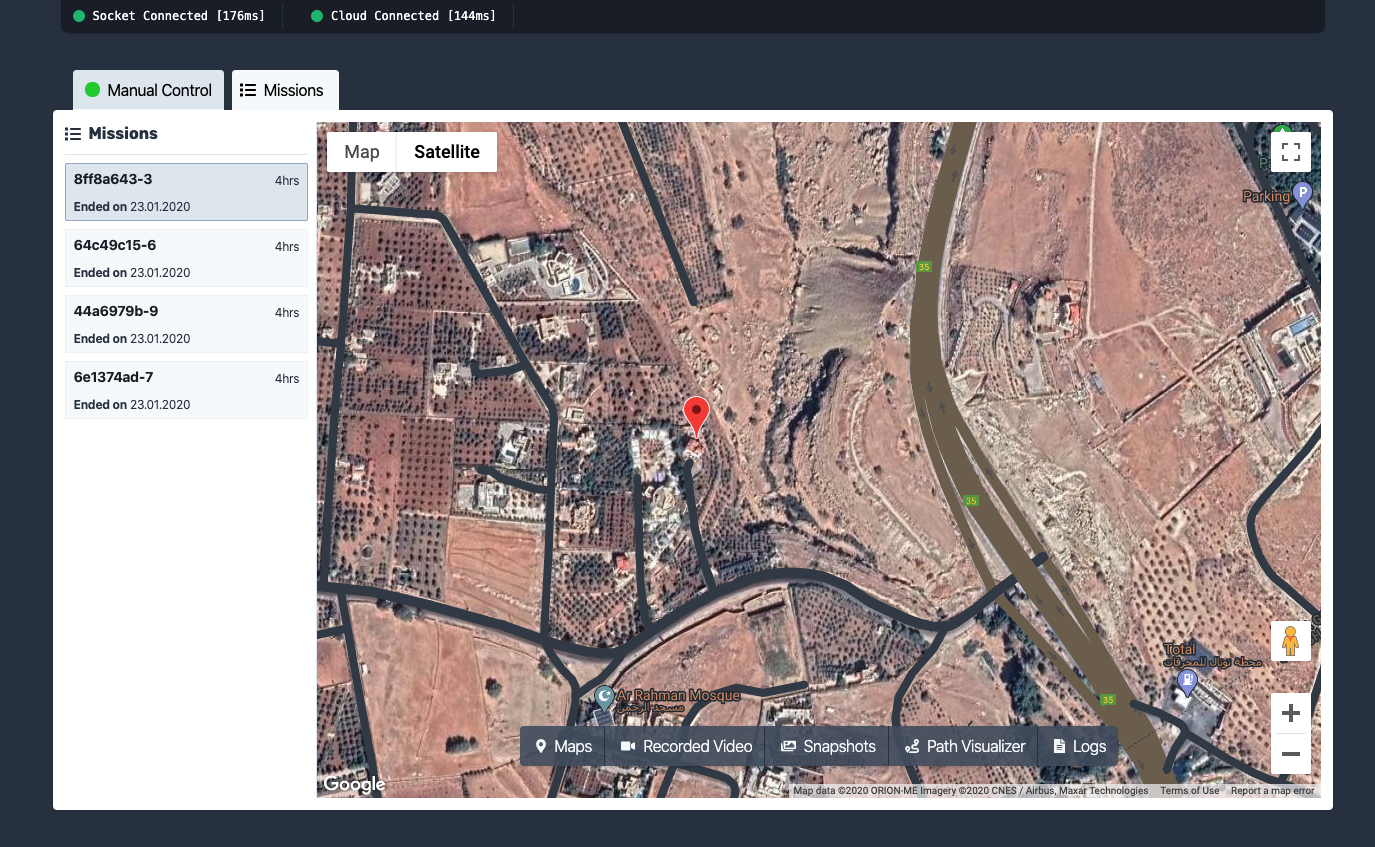
Operation Control Unit
The main contribution of mine is to build a modular architecture of the entire system: from hardware to the software, connect the vehicles to the cloud service, and to design and build the control unit.
The key priority of the architecture design is to create easily reconfigurable modules where each module is responsible for a specific task and can be seamlessly integrated with the other modules. With well-defined interfaces between them, the research teams could independently work and develop any module of interest.
Another feature that’s still under development is V-to-V communication: in case any of the vehicles lost the internet connection, it would look for the nearest internet-connected vehicle and start to send and receive the needed information through it.
It was an intresting project. I may write more technical highlights in future articles. But for now, if you need any further technical information don’t hestitate to contact me via email or Twitter.
Since 2019 is winding down, a new habit I’m planning to adapt in 2020 is to make the content I create sharable as much as possible through different channels. I’ve been almost hidden from the web for several years, and this is something I think I’ve regret the most. Not working in public or sharing stuff means that you are not working.
Signaling creates the authenticity that you’re building things over the days.
So, a new type of content I’m planning to publish is a content that doesn’t requrie a lot of effort. Something that could be as easy as writing a tweet. It could be incomplete thoughts, qoutes, ramblings from books and articles, normal journaling, life events, links, intresting stuff… or anything that could be articulated.